土木与交通学院吕辉教授团队在《Advanced Engineering Informatics》上发表最新研究成果
近日,土木与交通学院吕辉教授团队在工程信息学领域国际顶级期刊《Advanced Engineering Informatics》(中科院一区Top期刊,IF:8.0+)上发表了最新研究成果(A Multi-Module Optimized UAV-YOLOv11 Model and 3D Coordinate Reconstruction Method for UAV-Based Monitoring of Cable Dome Nodes)。硕士研究生温凌茜为论文主要完成人,吕辉教授和谢欣老师为共同通讯作者,南昌航空大学土木与交通学院为第一完成单位,浙江大学空间结构研究中心、浙江大学空间结构重点实验室、河海大学未来技术学院与同济大学土木工程学院为合作单位。该成果得到了国家自然科学基金的资助。
索穹顶作为典型的大跨度空间结构,被广泛应用于体育馆、交通枢纽等大型公共建筑中。在其施工和运维阶段,复杂的拓扑构型与预应力分布对几何精度控制提出了极高要求。传统的全站仪测量方法虽然精度高,但效率低下、成本高昂,且难以实现全场实时监测。近年来,无人机结合计算机视觉的非接触式测量技术为结构监测提供了新思路。然而,在实际工程应用中,该技术仍面临目标小且背景复杂、模型轻量化与高精度的矛盾及缺乏物理先验知识三大痛点。
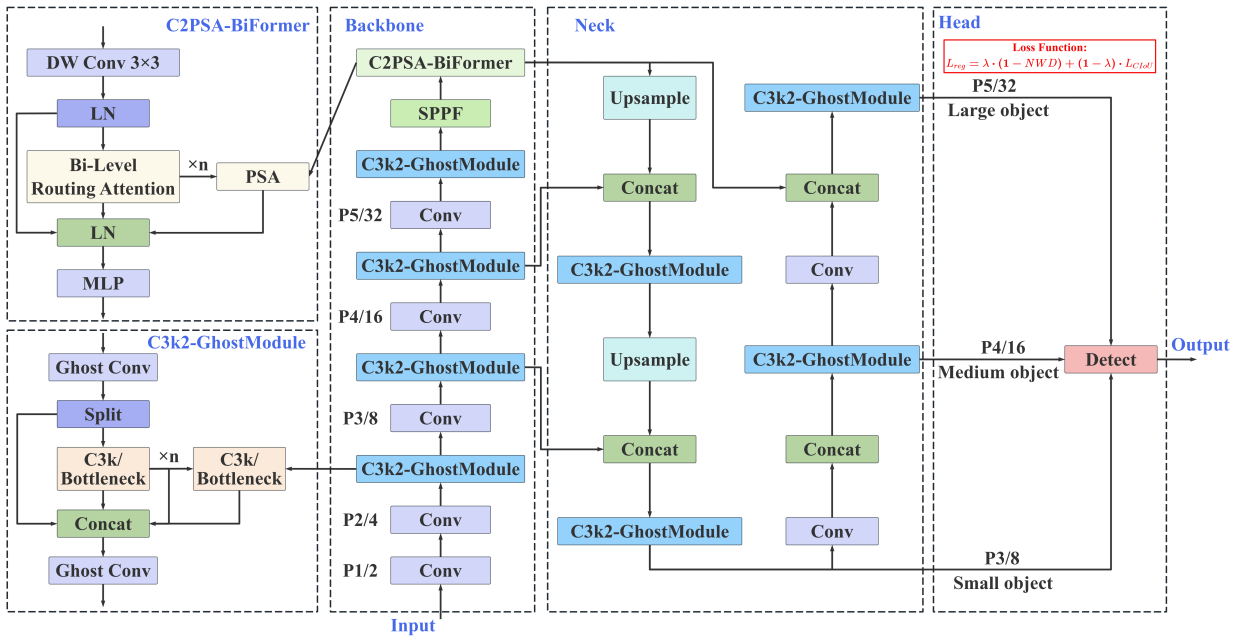
为解决上述问题,研究团队创新性地提出了一套全流程自动化的感知-求解协同框架。多模块优化的UAV-YOLOv11节点检测模型,为了在复杂背景下精准捕捉微小节点,研究团队对YOLOv11进行了深度改造:采用双层路由注意力机制,模拟检测工程师聚焦关键结构、抑制背景干扰的认知逻辑,实现了高效的动态稀疏准全局感知;利用GhostModule对模型进行轻量化设计,用廉价的线性变换生成特征图,显著降低了参数量,兼顾了性能与部署效率;采用归一化Wasserstein距离替换原始IoU损失,极大提升了模型对微小目标位置偏差的鲁棒性。
本研究最大的亮点是融合找形理论的3D坐标逆向重建机制。传统的视觉反投影易受相机标定和高度估计误差的影响。研究团队另辟蹊径:提取MATLAB找形算法中蕴含的几何形态、拓扑连接和对称性等结构物理规律;将这些规律转化为严格的数学约束条件;利用约束条件指导Python环境下的坐标反投影与优化求解。这一机制让深度学习看到的像素坐标与力学理论算出的物理规律协同工作,彻底将传统的离散人工测量转变为端到端、可解释、物理一致的智能系统。
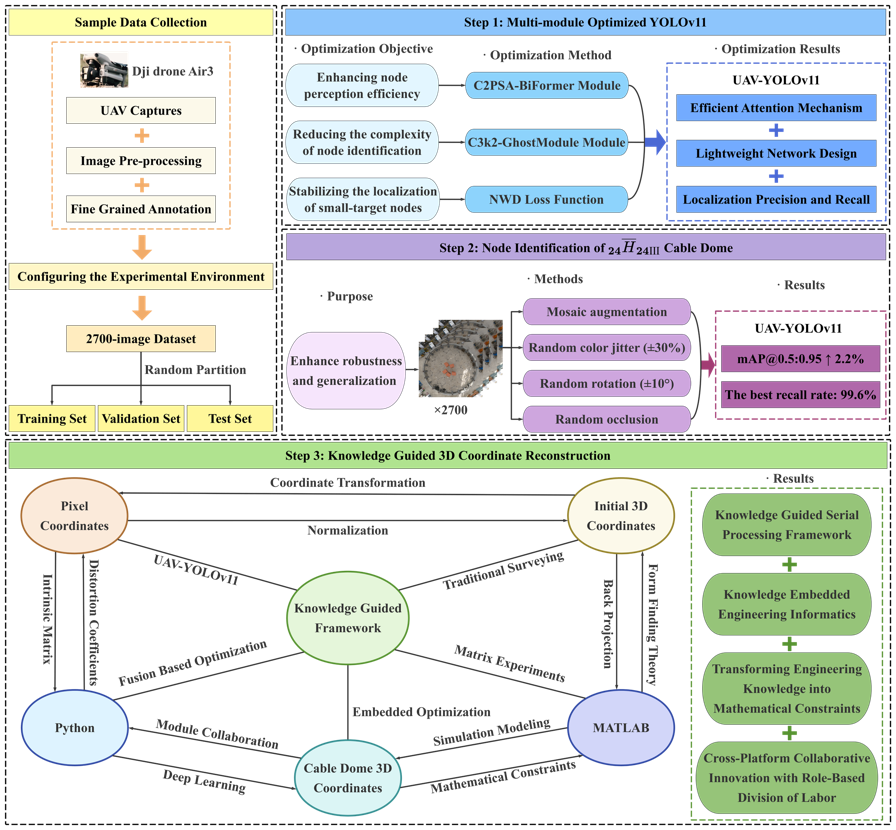
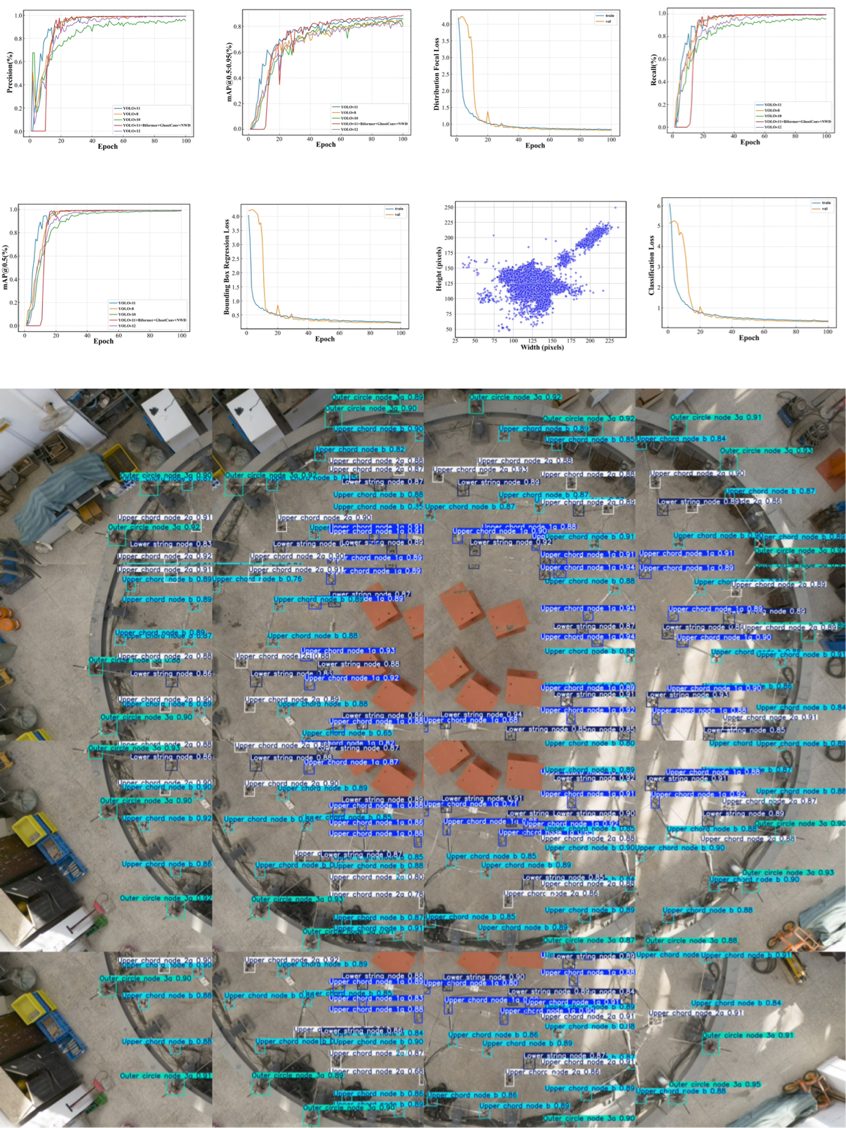
实验结果表明,该框架在精度和实用性上均取得了突破性进展。感知层优化的UAV-YOLOv11模型在复杂环境下对索穹顶节点的检测精度mAP@0.5:0.95提升至88.7%,召回率高达99.6%,在保证轻量化部署的同时,彻底告别了漏检和误检。求解层在知识引导的优化求解下,节点的三维坐标平均点测量误差仅为2.72cm,远优于规范要求的限值,完全满足实际工程对厘米级异常位移识别的严苛要求。
本研究成果覆盖了从施工期节点精度快速校验,到运营期结构健康监测的全生命周期。不仅为大跨度空间结构的数字化建造与运维提供了可靠的技术路径,也为工程信息学方法在土木工程领域的落地应用树立了新典范。南昌航空大学土木与交通学院吕辉教授团队长期致力于空间结构体系创新、找形分析、大跨度结构智能监测及施工控制等方向的研究。团队在新型空间结构领域底蕴深厚,近年来在国内外高水平学术期刊发表多篇重要成果。
(图文一审:张晓亮 图文二审:周光权 图文三审:王秋先)